![]()
项目简介
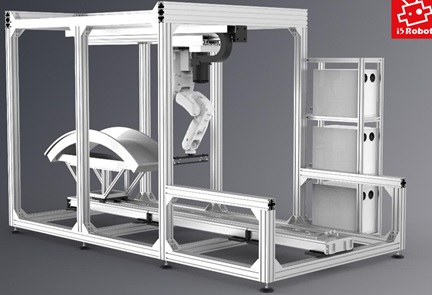
1、项目名称:盾构管片抹平机器人系统的研制与开发
项目状态:正在进行
项目主要内容和成果:项目设计一款新型智能盾构管片抹平机器人,去代替人工抹平。机器人在控制位置的同时,通过控制六个关节伺服电机的电流,来让末端执行器在抹平的过程中对圆弧管片表面始终施加均匀的抹平力,从而提高抹平效率和质量。
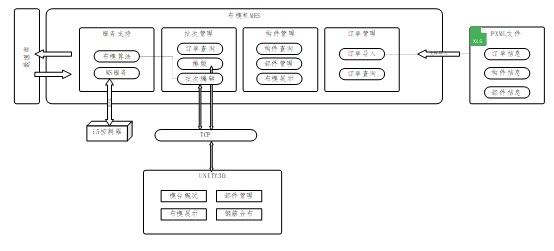
2.、项目名称:装配式构件制造布模机计算机辅助工艺及编程系统
项目状态:正在进行
项目主要内容和成果:
“装配式构件制造布模机计算机辅助工艺及编程系统”是建筑行业预制件生产中的一个自动化解决方案。它可对BIM软件导入的信息进行整理,管理订单、构件和批次,自动生成布模程序并将布模结果3D化展示。以此大大提高预制构件的生产效率。

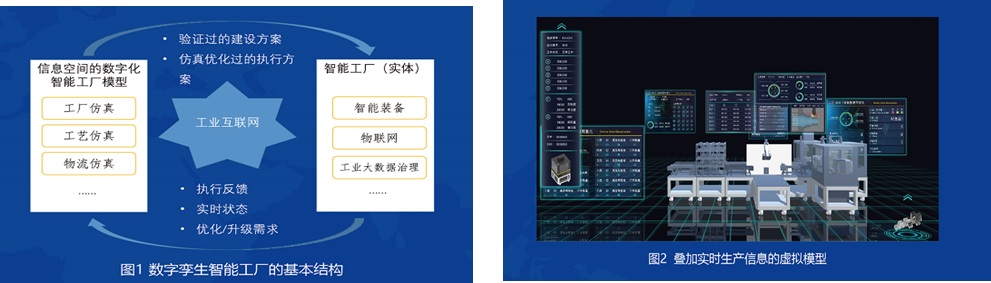
3、项目名称:基于数字孪生的虚拟仿真优化技术
项目状态:正在进行
项目内容和成果:
本项目将互联网+和数字孪生技术融入该公司研发的智能制造系统中,开发完成数字化孪生仿真模型及基于互联网的定制信息系统,实现了网络化定制下达生产订单,数字化孪生系统在线仿真模拟,真实展现生产场景,并可通过移动设备进行浏览和信息管理。
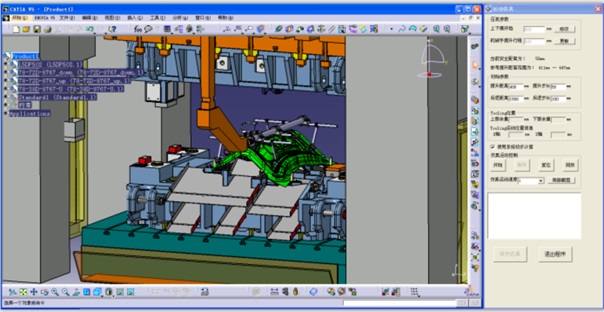
4、项目名称:汽车冲压线端拾器自动设计系统
项目状态:已完成
项目主要内容和成果:
端拾器是用于冲压线物料输送的一种工装。由于各工位的冲压型面不同,端拾器的形状需根据型面进行调整,吸盘布局和连接杆的角度、位置都不相同。此外,端拾器必须具备良好的空间精度,这就使得端拾器设计和组装存在一定困难。
为了减少高速冲压线上装调端拾器造成的产能浪费,本研究分析了端拾器装配过程的数学本质,引入机器人运动学Denavit-Hartenberg模型,基于反向运动学原理和虚拟装配的空间约束关系,建立了端拾器空间装配的数学模型和位置调整策略。在此基础上,采用机器人运动学的分析方法,对端拾器的自动化设计进行了研究,并采用Matlab求解了该运动学的逆解问题,最后通过对CATIA CAD系统的二次开发,建立了端拾器自动化设计系统。