Forschung
![]()
Kuszvorstellung des Forschungsprojektes
1、Projektname:Forschung und Entwicklung eines Schildvortriebsrobotersystems;
Projektstatus:Aktuelle;
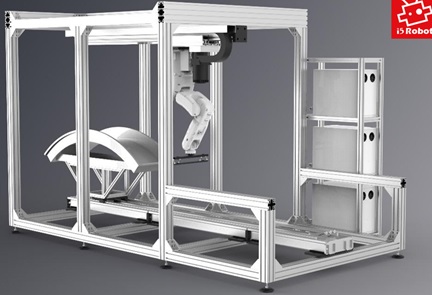
Hauptinhalte und Ergebnisse des Projekts: Das Projekt entwarf einen neuen intelligenten Schirmanstrichroboter, um die Arbeitskräfte zu ersetzen. Durch Steuern des Stroms der sechs Gelenk-Servomotoren ermöglicht der Roboter dem End-Effektor, während des Glättungsvorgangs eine gleichmäßige Nivellierungskraft auf die Oberfläche des Kreisbogens auszuüben, wodurch die Glätteffizienz und -qualität verbessert werden.
2、Projektname: Computergestütztes Fertigungs- und Programmiersystem für Schalungsroboter zur Herstellung von vorgefertigten Produktionen
Projektstatus: aktuelle
Hauptinhalte und Ergebnisse des Projekts:
“ Computergestütztes Fertigungs- und Programmiersystem für Schalungsroboter zur Herstellung von vorgefertigten Produktionen“ ist eine Automatisierungslösung in der Bauindustrie. Das System klassifiziert die von der BIM-Software importierten Aufträge, teilt die Produktionschargen auf und ist für die 3D-Darstellung der Layout-Ergebnisse zuständig.


Verglichen mit der traditionellen Herstellung von vorgefertigten Produktionen hat das System die folgenden Vorteile: Maximierung des Platzbedarfs, Optimierung der Schalungsabdeckung, Visualisierung von Ergebnissen, Prozessautomatisierung usw.
3、Projektname: Virtuelle Simulationsoptimierungstechnologie basierend auf Digital Twins
Projektstatus: aktuelle
Hauptinhalte und Ergebnisse des Projekts:
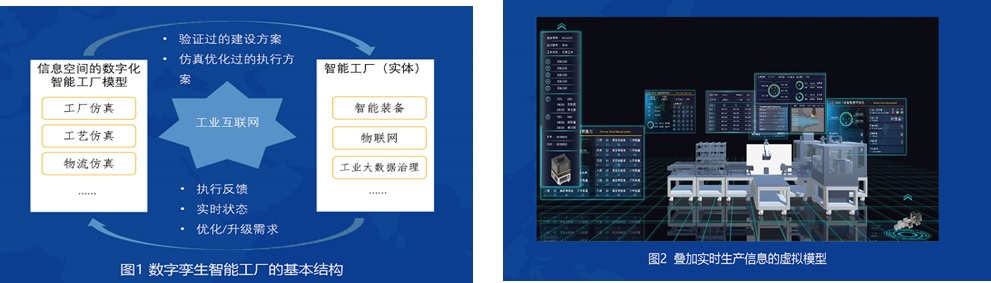
Dieses Projekt integriert Internet + und digital Twins Technologie in das intelligente Fertigungssystem von dem Unternehmen entwickelt, entwickelt digitale Zwillings-Simulationsmodell und Internet-basierte maßgeschneiderte Informationssystem, realisiert vernetzte benutzerdefinierte Produktionsauftrag, digitale Simulationssystem Online-Simulation, real Zeigen Sie Produktionsszenarien an und durchsuchen und verwalten Sie Informationen über mobile Geräte.
Digital Twins ist eine virtuelle Echtzeitversion des aktuell laufenden Geräts, die zur Bereitstellung von Produktleistungs- und Wartungsinformationen verwendet werden kann. Die Sensoren auf dem Gerät senden Temperatur, Vibration, Kollision, Last und andere Daten an den digitalen Zwilling, und dann sind die digitalen Zwillinge mit den Änderungen
Die digitale Twins kann frühzeitig vorhersagen, wenn verschlissene Teile während geplanter Stillstandszeiten ausgetauscht werden müssen, um ungeplante Ausfallzeiten zu vermeiden. Darüber hinaus können Benutzer die gesammelten Daten verwenden, um das Design von Maschinen der nächsten Generation zu verbessern.
4、Projektname: Automatisches Design System der Auto Presslinie Tooling
Projektstatus: Abgeschlossen
Hauptinhalte und Ergebnisse des Projekts:
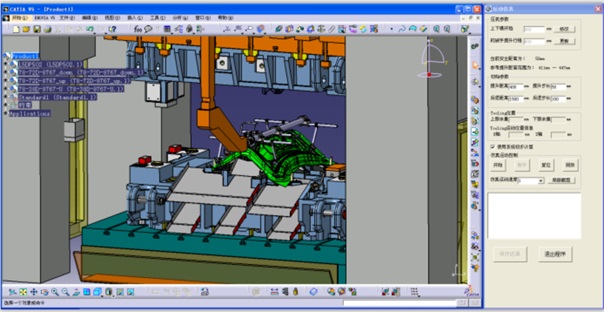
Die Tooling der Presslinie, die für eine Art von Presswerkzeugmaterialtransportleitung, sind verantwortlich für die Be- und Entladen der Werkstückklemme ist das Prinzip von dem Roboter transportiert ein Werkstück von einer Station zu einer anderen Station zu greifen. Aufgrund der verschiedenen Prägestationen jedes Profil ist die Position, die Form der Tooling für eine Winkelverstellung, das Spannfutter, um das Layout und nach Pleuels Profil, nicht die gleiche. Außerdem erfordert die Hochgeschwindigkeitsproduktion des Stempelns eine gute räumliche Genauigkeit der Tooling, was es schwierig macht, den Endpicker zu konstruieren und zu montieren.
Um die Kapazitätsverluste durch das Be- und Entladen der Hochgeschwindigkeitspressenlinie zu reduzieren, analysiert diese Studie das mathematische Wesen des Montageprozesses des Endpickers, führt das Denevity-Hartenberg-Modell der Roboterkinematik auf der Grundlage des inversen Kinematikprinzips und der räumlichen Randbedingung der virtuellen Montage ein. Eine mathematische Modell- und Positionsanpassungsstrategie für die Montage des Endpickerraums wird festgelegt. Auf dieser Basis wurde mit der roboterkinematischen Analyse das Automationsdesign des Endpickers untersucht und die inverse Lösung der Kinematik von Matlab gelöst und schließlich die Sekundärentwicklung des CATIA CAD-Systems etabliert. End-Picker-Automation-Design-System.